前几天看到群里有人提到连续流反应,正好把之前做的一款开源注射泵的信息搬过来。注射泵的特点是精度高,成本相对不算昂贵,而且结构很适合DIY;Github上注射泵的DIY项目也不少,各有参考价值。SHIGURE只是我个人针对自身需求的一种解决方案。
SHIGURE的项目主页: https://github.com/RimoAccelerator/SHIGURE
效果视频:https://www.bilibili.com/video/BV1yKQJYwEgC/
以下内容同Github页面:
SHIGURE:一款开源的在线控制注射泵
背景和原理
输液泵是实验室自动化中最基础的部件之一,而注射泵是所有泵中最容易DIY的(虽然成本不一定最低)。市场上注射泵的价格在500-1000+ RMB左右,相比之下DIY的注射泵更有性价比,不仅能实现相似的功能,还有灵活得多的控制方式,可适配多种自定义的用途。SHIGURE是开源的在线控制注射泵,遵循如下步骤,每个人都能组装出一台可以同时使用Wifi和串口方式控制的注射泵,并且借助客户端可以实现复杂的流程控制、甚至多泵协同工作。
注射泵的核心部件是步进电机和丝杆滑台。步进电机在接收脉冲后旋转,通过丝杆滑台转化为线性位移,只需用固定件将注射器固定在滑台上即可。为了能兼容往复运动以及不同规格和含有不同量液体的注射器,设计了一个用4组螺杆和8个手拧螺母的调节机构,可以在前后上下方向改变注射器卡口的位置。
为了控制步进电机,使用树莓派Pico发送PWM脉冲给TMC2209控制模块后驱动电机运动。在丝杆滑台两端设置限位开关,当滑块运动到尽头时及时停止运动。
为了实现对硬件的操纵,使用带有Wifi功能的树莓派Pico W,同时允许串口控制。
目录结构
Models: 3D打印PCB外壳文件;各固定件的图纸文件;
PCB:嘉立创EDA的项目文件和Gerber文件;
ShigureController:控制软件代码;
shigure_main.py:树莓派pico上的micropython代码。
精度参数
| 注射器(mL) | 最小流速 (mL/min) | 最大流速 (mL/min) | 流速精度 |
| --- | --- | --- | --- |
| 30 | 0.51 | 200 | ±5% |
| 10 | 0.20 | 80 | ±3% |
| 5 | 0.15 | 50 | ±1% |
| 1 | 0.03 | 10 | ±1% |
物料和成本
以下为直接采购的物料:
| 物料 | 数量 | 型号/供应商 | 单个成本 (RMB) |
| --- | --- | --- | --- |
| 丝杆滑台 | 1 | 1204/100 mm 东台市欧力传动部件有限公司 | 150 |
| 限位开关 | 2 | NPN 海杰嘉创行星减速机工厂 | 15 |
| 树莓派Pico W | 1 | - | 52 |
| TMC2209模块 | 1 | 同拓展志 | 14 |
| M4螺丝 | 4 | - | - |
| M4螺柱 | 4 | - | - |
| 手拧螺母(羊角) | 4 | - | - |
| 手拧螺母(圆形) | 4 | - | - |
| 1 k电阻 | 5 | - | - |
| 二极管 | 2 | IN4148 | - |
| LED | 2 | - | - |
| CH340串口转USB模块 | 1 | - | 6 |
| 导线、连接座 | 若干 | - | - |
以上各部件均来自淘宝。树莓派Pico W必须使用原版。
需要制作4个固定件,参考成本:嘉立创3D打印,约25元;嘉立创钣金加工,约70元。
机械部分装配过程
打印零件
固定件1
固定件2(互为镜像的一对,以下只展示一个)
固定件3
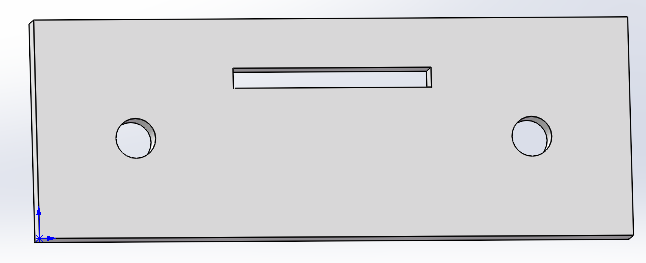
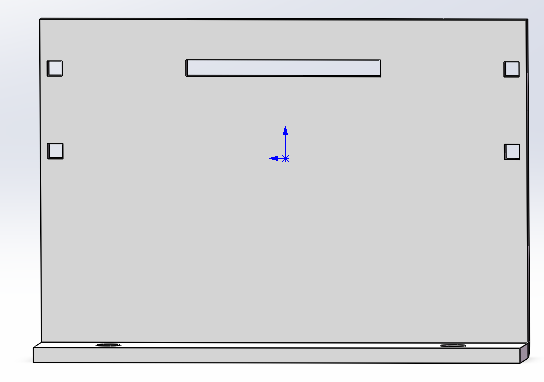
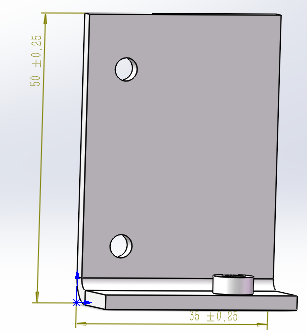
固定件4
关于孔大小:
所有孔均设计为M4尺寸。在图纸中,孔直径按照3.3 mm画,如果进行CNC加工可以自动识别为M4螺丝座。如果是3D打印,需将孔直径改成合适的值(至少是4 mm)。
其中固定件4要特别说明。固定件4上的2个螺纹孔位需要插入M4螺柱,且上下没有螺母紧固,需要自身螺纹将螺柱咬住。这是所有打印件里唯一对孔大小有较严格要求的部分。如果使用3D打印加工,图纸上的孔位半径需要根据打印机状态调整,适应公差。例如,开发者自有的3D打印机打出来的孔负公差很大,而嘉立创的3D打印则公差较小。对于前者,此处孔径需要设计为4.4 mm左右,而对于后者可设计为3.8 mm左右,需要尝试和经验。好在对于树脂3D打印器件,无论孔是开得偏大还是偏小都有手动处理的办法,如果孔太大可以用热熔胶将螺柱粘上去,如果孔太小可以用火烧一烧。
安装限位开关

- 安装固定件1,将螺丝打在电机一侧固定端的孔位,在外侧以螺母固定,并利用两侧的孔位安装弹簧。图纸中设计了2个弹簧孔位,至少要在顶部与注射器卡槽平齐的一组安装弹簧。

- 在丝杆滑台侧面安装固定件2,将螺丝打进滑块侧面的孔位,在外侧以螺母固定。
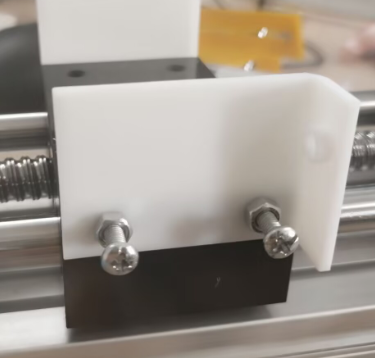
- 通过固定件2,插入M4螺柱,在靠内侧一端以螺母固定,靠外侧一端放入圆形手拧螺母。随后在螺柱上安装固定件4,外侧以羊角手拧螺母固定。这里螺柱的作用是调节注射器活塞卡口位置以适配各种型号、或存有各种体积液体的注射器,因此可以选用足够长的螺柱。作为演示,此处使用了短螺柱。
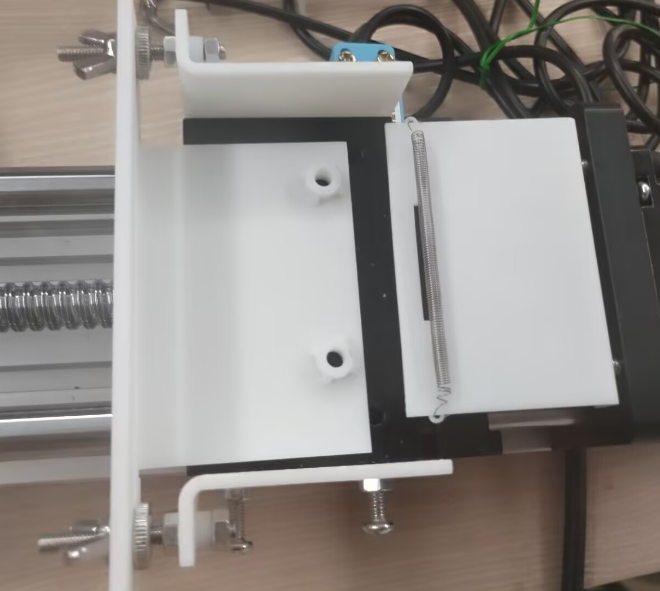
在固定件4的两个空位上插入M4螺柱,不使用螺母固定。在螺柱上依次放入圆形手拧螺母、固定件3、羊角手拧螺母。放入注射器,通过调节4组手拧螺母可改变固定件3和4的位置以适应注射器长度和高度。
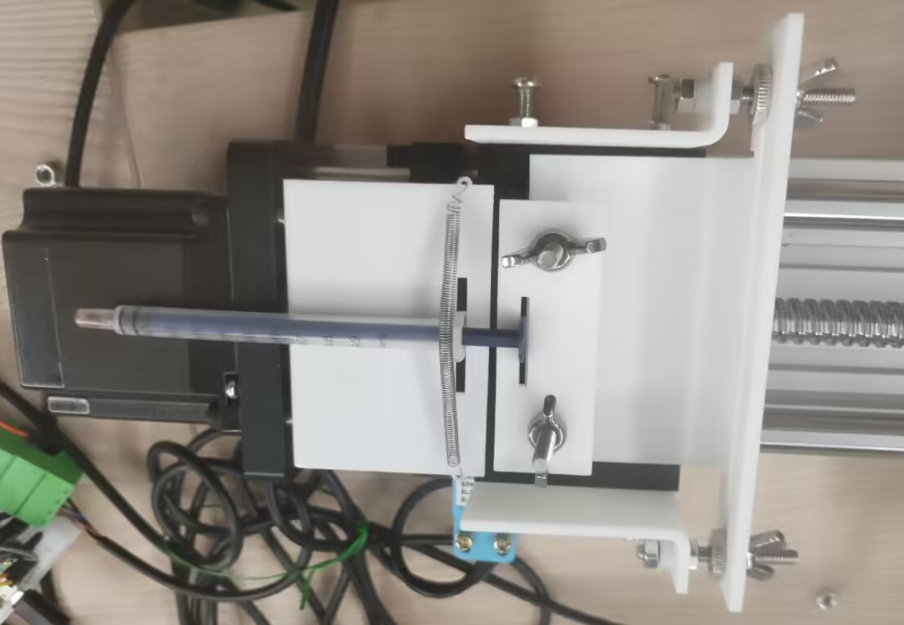
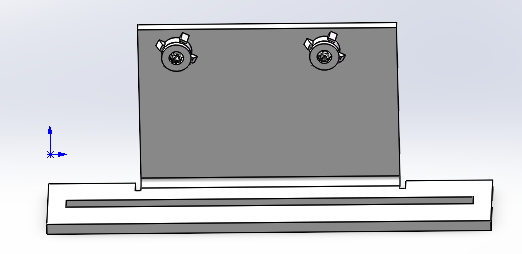
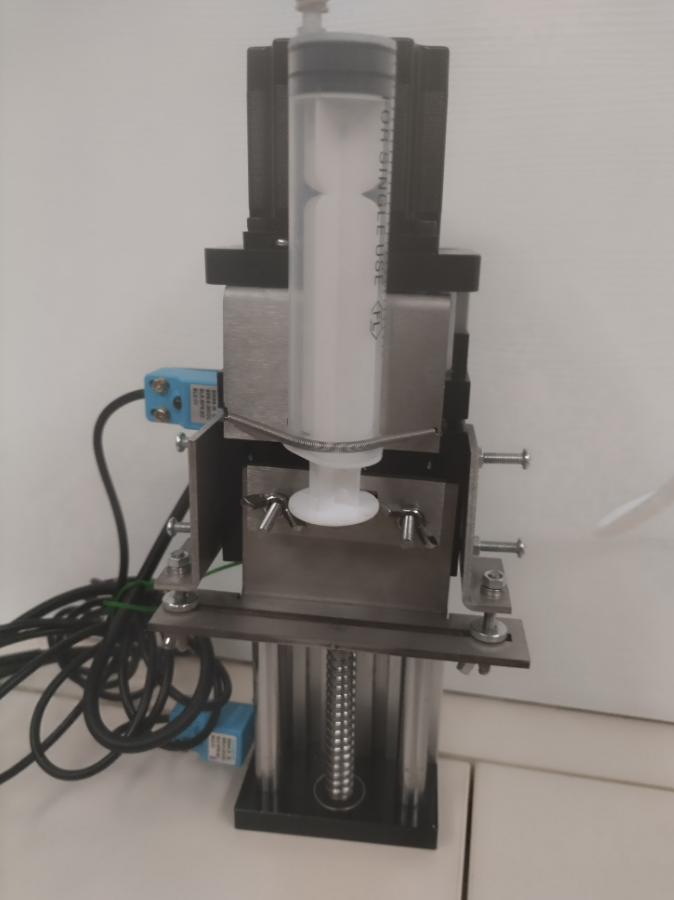
以下是使用钣金件的版本,强度更高:
电子部分
使用树莓派Pico W进行控制,利用TMC2209驱动电机。以下为原理图:
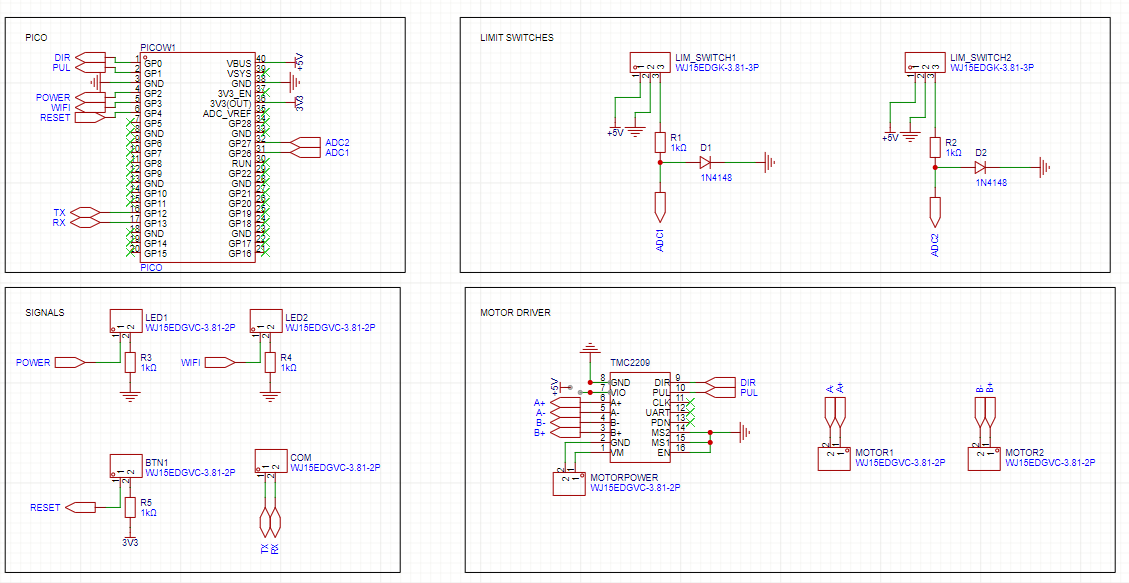
TMC2209模块采用Pico的5 V供电,57步进电机使用12 V/2 A的电源。电机电源线和4个线圈连线接在TMC2209上。Pico的GPIO0和1分别用作DIR和PUL,GPIO2-4分别用于控制电源指示灯、控制WIFI指示灯和接收开关按键信号。GPIO12和13留作与上位机通信的串口接口。
两个限位开关使用5 V供电,两个限位开关平时输出5 V电压,在滑块靠近时输出0 V。由于Pico不能直接读取5 V电平,使用二极管钳位电路将限位开关输出的5 V转化为大约0.7 V电位后,通过GPIO26和27进行ADC读取。当这两个引脚的输入电压低于0.5 V时,判定为滑块接近限位开关,停止滑块运动。
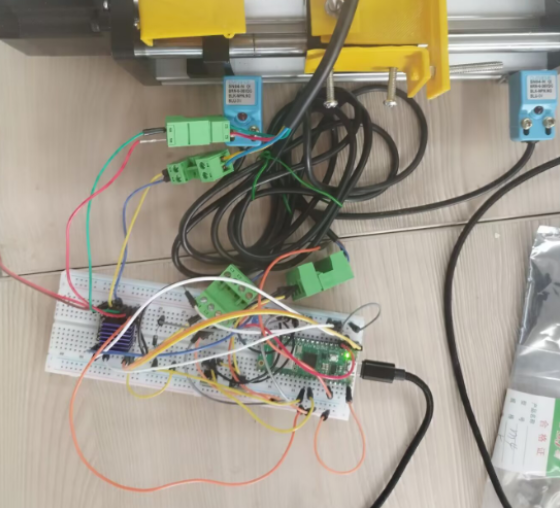
在面包板上的连接相对而言是比较简单的:
以上电路可以转移到一个7.2 * 7.0 cm2的PCB板上:

操作过程
AP模式
SHIGURE第一次运行时,Wifi处于未配置状态。开始运行后,GP2连接的电源LED亮起,GP3连接的Wifi LED不亮,程序处于AP模式,将产生一个以PumpXX为名称的Wifi信号,其中XX是100以内的随机数。连接这个Wifi(密码是bsjinstrument)后,访问192.168.4.1,进入注射泵控制页面。
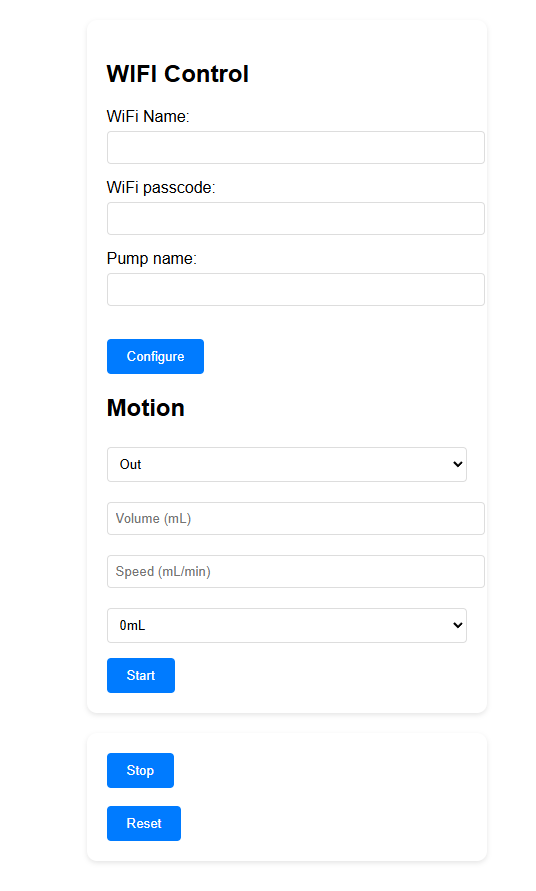
在这一页面,可以输入Wifi信息,点击Configure,则机器将Wifi信息写入存储中并自动重启连接该Wifi,进入Wifi模式,此时GP4连接的Wifi LED亮起。Pump name可以自定义。机器连接Wifi后,AP模式同样可以使用,与此同时,同Wifi内的设备也可以访问注射泵。
如果需要重置,可以长按开关3 s。如果短按,则设备会重启但不重置。
网页控制
在网页内的Motion模块,可以选择注射器型号、设置体积和流速。In和Out分别对应吸液和推液。点击Reset后,SHIGURE会推出液体,直到达到限位开关位置。
如果注射器规格选择0 mL,则Volume和Speed分别表示移动的距离(mm)和速度(mm/min)。
客户端控制
Wifi模式中,注射泵连接Wifi并获得IP地址。输入注射泵的IP地址后,可以打开相同页面。但一般用户不容易知道注射泵的IP地址,ShigureController客户端提供了控制局域网内所有注射泵的平台。
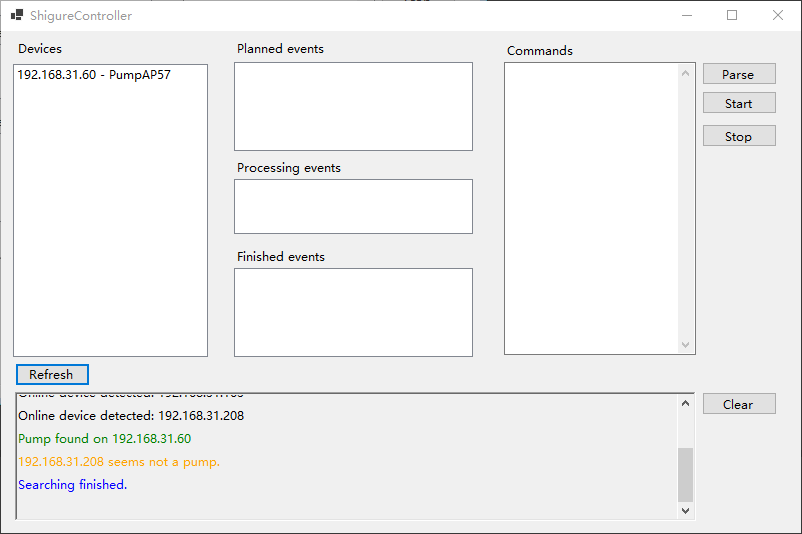
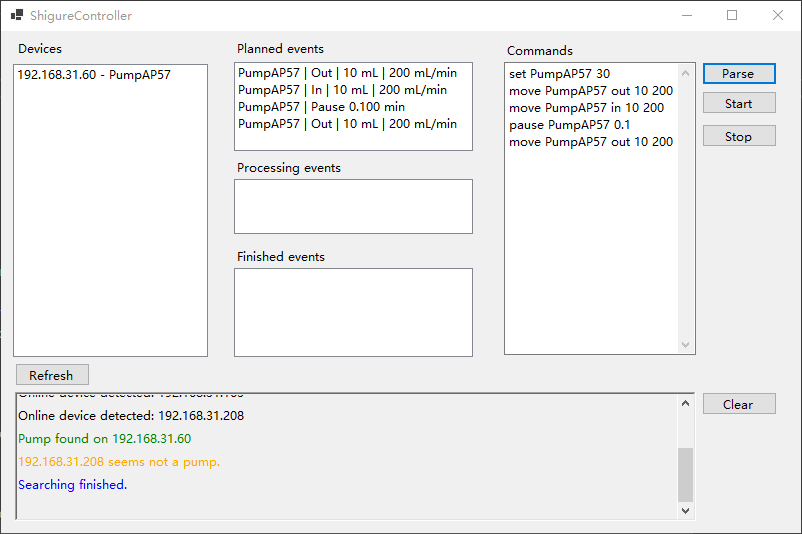
运行ShigureController后,程序会自动搜索局域网内的设备,将注射泵的IP和名称列出。用户在Commands里,按照如下格式输入命令:
set ID xx #为相应ID的泵设置注射器规格为xx mL
move ID direction volume speed
#让相应ID的泵按照给定方向(in或out)以指定流速(mL/min)运行指定体积(mL)
pause ID xx #让相应ID的泵停止xx min
以下是一个例子:
set PumpAP57 30
move PumpAP57 out 10 200
move PumpAP57 in 10 200
pause PumpAP57 0.1
move PumpAP57 out 10 200
在这个例子中,PumpAP57采用30 mL注射器,先以200 mL/min打出10 mL,再吸入10 mL,暂停6 s后再打出10 mL。为了兼容网络延迟,使用客户端控制时,每两个动作之间会有一段3 s的暂停。
当存在多个泵时,可以用类似的方法控制每个泵实现协同工作。(但目前未测试过多泵协同,这是由于只组装了一台)
在输入命令后,首先点击Parse,则这些事件规划进入到Planned events中:
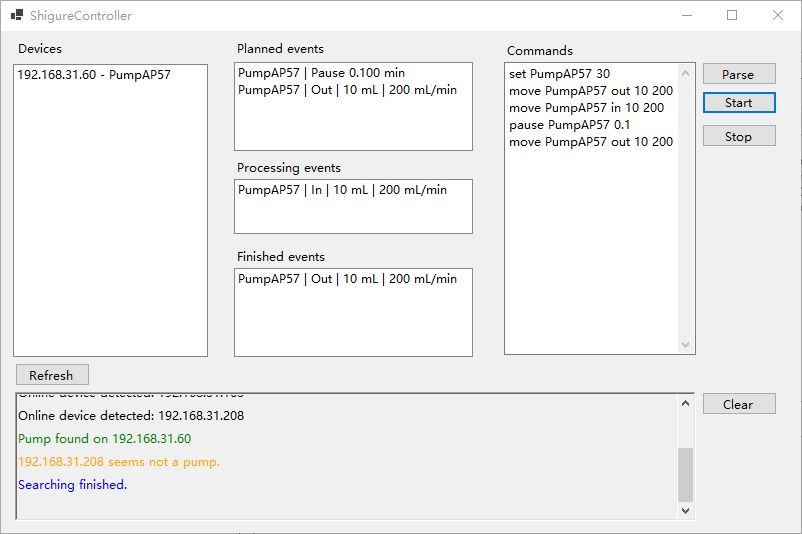
然后点击Start,开始依次执行:
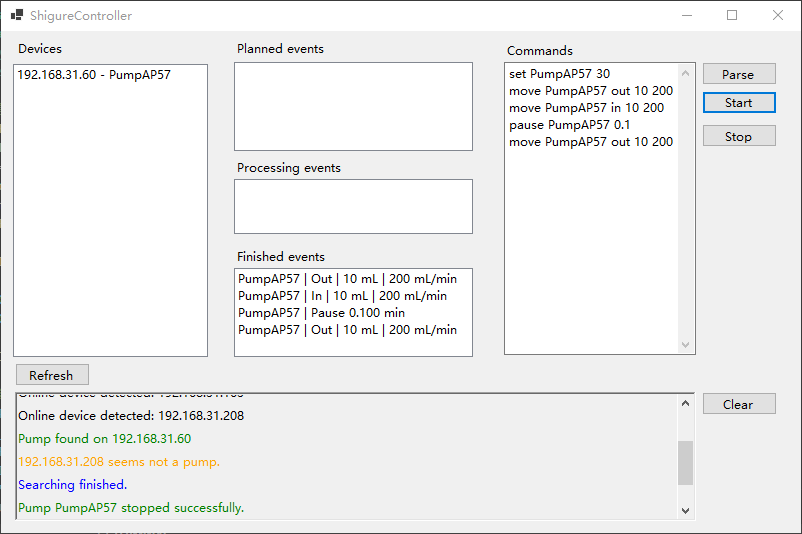
执行完成后,所有事件都将进入到Finished events中。当然也可以随时点击Stop停止流程。
串口控制
除了网络控制外,SHIGURE预留了串口线,可以同时接受串口信号,但不会返回信号。波特率采用9600,通信格式为:
set syringe XX #设置注射器规格为XX mL
move direction volume speed
#按照给定方向(in或out)以指定流速(mL/min)运行指定体积(mL)
stop #停止
reset #重置